The OpenForce Project
Open source force feedback devices
What is OpenForce?
The OpenForce project was launched to develop open-source force feedback devices, aiming to democratize this unique haptic technology and empower more people to experiment with and innovate in the field!
At Senmag Robotics, we have been developing force feedback systems for several years and understand the power of haptics. Inspired by other open-source projects such as Prusa and Voron, we are starting OpenForce to provide a more accessible, hackable platform to support more open collaboration in the haptic feedback space!
We want to create a community of innovators. If you have ever wanted to experiment with force feedback, haptics, robotics in general, or just want to have the fun of building your own robot arm, OpenForce is the place for you!
The OpenForce Principles:
Hackable:
We want OpenForce to be a platform that truly democratises force feedback technology, that encourages and fosters community experimentation and development.
Accessible:
From children to VR enthusiasts to haptic experts, we want to make force feedback technology available to all, regardless of their background / knowledge.
Capable:
While force feedback devices are awesome, we’re not just building them as toys. Force feedback technology has the potential to solve numerous real-world problems, and so OpenForce designs should be both practical and fun!
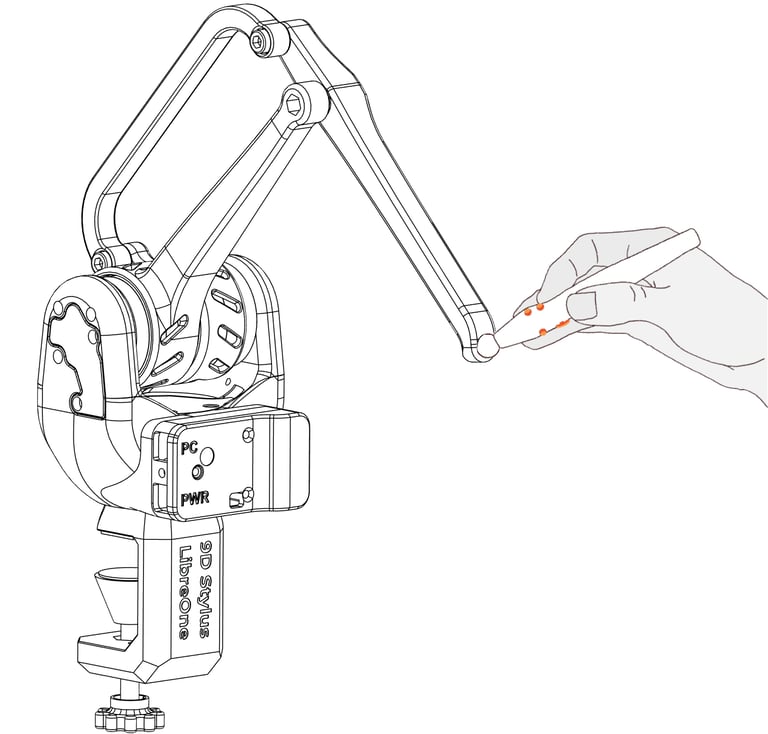
9D Stylus LibreOne: Your own open-source force feedback device!
LibreOne is the first open-source force feedback device in the OpenForce project. With build costs starting as low as £300 per device, it is a platform intended to thrill anyone interested in haptic feedback, VR or robotics!
Following the OpenForce design principles, LibreOne is a 6D tracking + 3D force feedback device that you can build, customise, and hack at home. When designing LibreOne, we used off-the-shelf parts wherever possible and 3D-printable designs wherever not, meaning it is cheap and easy to construct your own device!
LibreOne's hardware, firmware and software is Liscenced under the GNU General Public License v3.0, to be fully customisable and hackable. Check out our prebuilt devices or kits to get started!
The Specs:
6D sub-milimetre position tracking,
3D force feedback (upto 1/2 Kg of force),
Reliable direct drive motors,
USBC power supply,
Powerful integrated STM32 processor,
Getting started with LibreOne:


The best option for individuals or organisations who want a reliable and dependable device, quickly.
Ready to run out of the box, our pre-built LibreOne's come with high quality components and 3D prints and are the easiest way to start experimenting with force feedback!




A great option for those who want to learn a bit about the hardware while saving some costs!
Our full kit includes all the high-quality parts you need to assemble you own LibreOne device.
For those who have access to a 3D printer, and want to customise their LibreOne!
the mechanical kit includes all the electronics, motors, and fastenings you need, but you must 3D print your own parts!
For those on a budget or who want to experiment with hardware modifications.
This kit includes the pre-programmed motherboard, stylus module, three encoders and cabling. You must source everything else yourself
Our Libre One Kits - The easiest way to get started:
Pre-built Kit
Full Kit
Mechanical Kit
Electronics Only
Senmag Robotics Ltd
Democratising the sense of touch.
Bristol UK
© 2025. All rights reserved.